

日本文理大の航空宇宙工学科ではトンボロボット(トンボの形をした超小型の無人飛行機)を研究しています。
しかし、近頃はマルチローター機(いわゆるドローンですね)が全盛で、ほかの形式の無人飛行機はなかなか表舞台に出してもらえません。
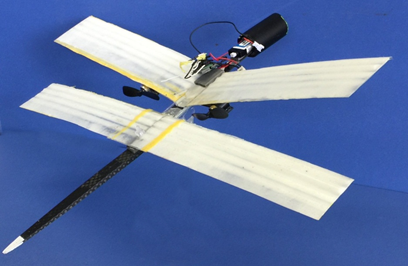
トンボロボットはしっかりとした4枚の羽根を持った飛行機で、その羽根が高性能なので、マルチローター機ではできないことがたくさんあると信じて研究を続けてきたのですが、マルチローター機の隆盛に、時には心が折れそうになることも・・・。
どちらかと言うとこれまでは、「マルチローター機憎し」みたいな姿勢だったのですが、こんな後ろ向きな気持ちでは良いものはできっこないですよね。そこで、気を取り直して、マルチローター機とトンボロボットの良いところを組み合わせて、更に良いものができないかと始めたのが、現在の研究。
4個のモーターを使って、通常の飛行機が持つ操縦装置(エレベーター、ラダー、エルロン)の役目ができないか・・・
ゆくゆくはトンボロボットに適用しますが、今はその前段階で、普通の形の模型飛行機に4個のモーターを取り付けて、自在に飛行しようと実験中!
今日は3回目の飛行試験で、ようやく少し長く飛ぶようになってきましたよ。



 0120-097-593
0120-097-593